Components Used
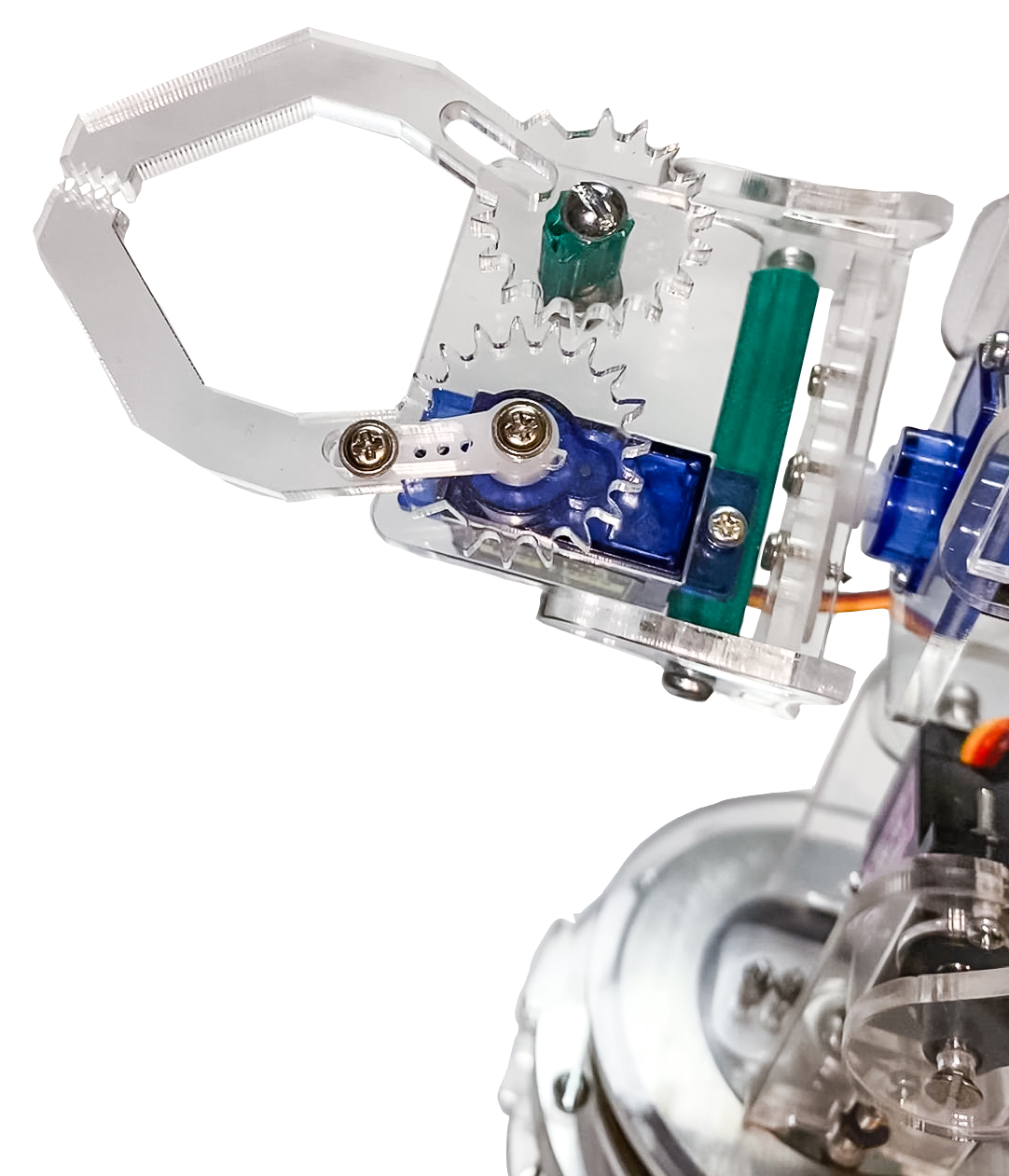
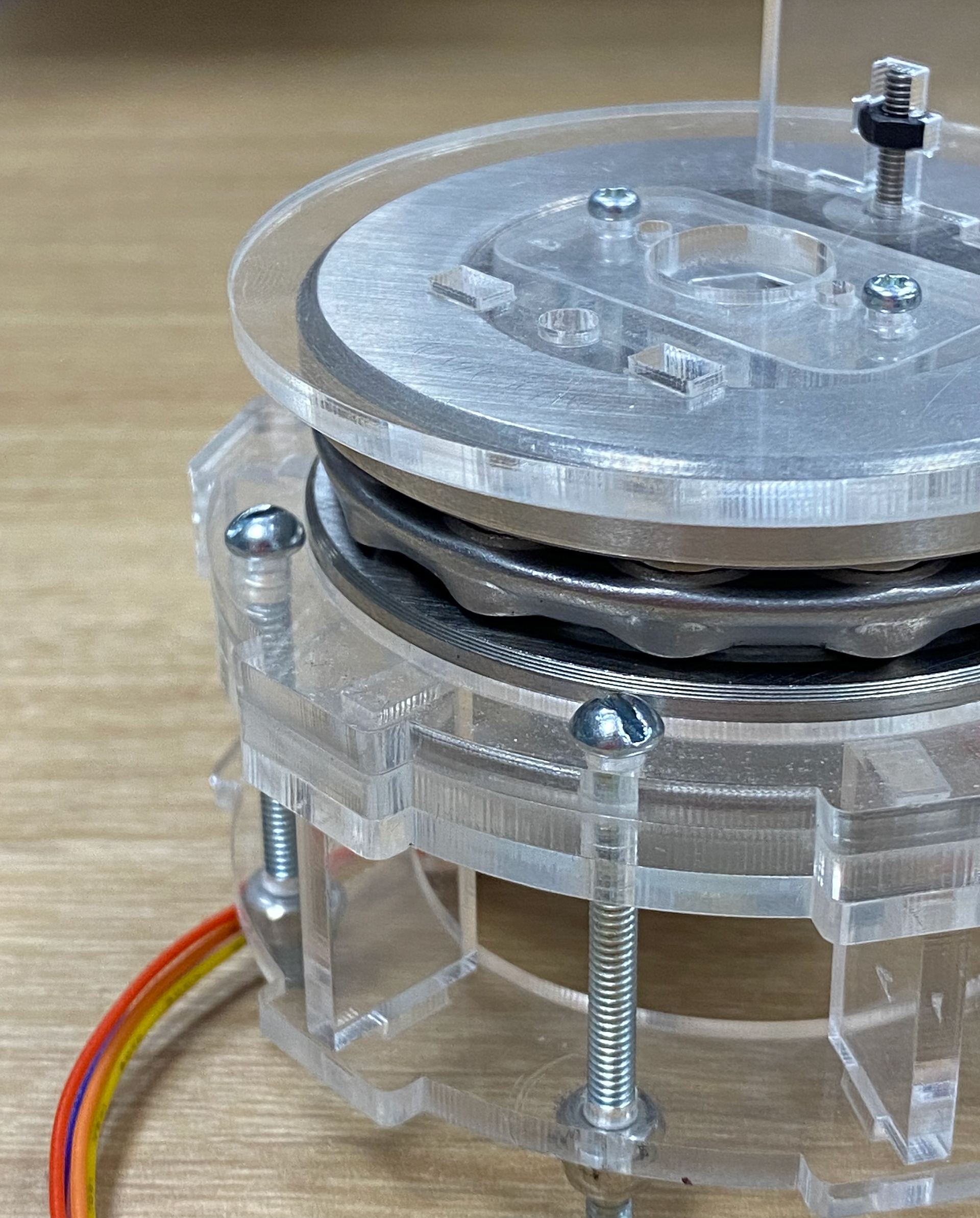
The project features a robotic arm with four servomotors and a stepper motor. It involves detailed work from modeling in SolidWorks to programming in C++. The precise control of each motor and the use of potentiometers make this robotic arm adaptable for various applications.
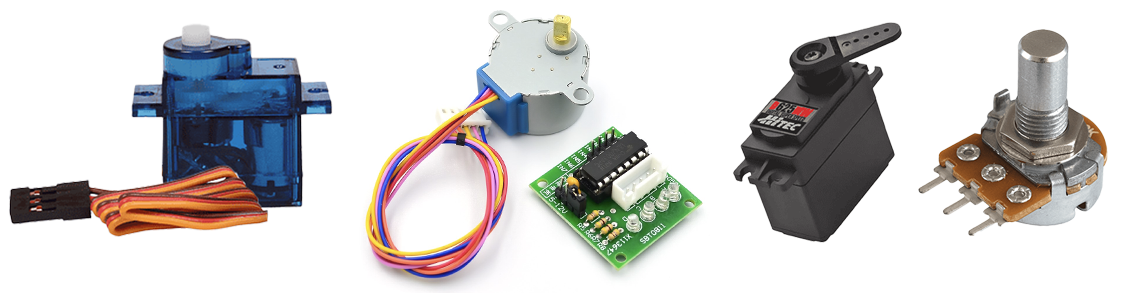
Servomotors - Stepper motor - Potentiometers



This project has been essential for developing skills in mechatronics and laying the groundwork for future design projects.
Armado de piezas en Solid Works